gwModels kick velocity models
gwModel_kick_q200 : aligned-spin analytical kick model trained on NR (SXS + RIT, \(q \leq 32\)) and BHPT data (\(q \leq 200\)). Valid for \(1 \leq q \leq 1000\).
gwModel_kick_q200_GPR : aligned-spin GPR kick model trained on the same dataset. Provides both analytical and GPR predictions with uncertainty.
gwModel_kick_prec_flow : normalizing-flow model for precessing-spin kick distributions, trained on NR (\(q \leq 32\)) and BHPT (\(q \leq 100\)). Returns samples from the kick distribution marginalized over spin angles.
All models from Islam & Wadekar (2025), https://arxiv.org/abs/2511.11536
torch, nflowsscikit-learn[1]:
import sys
!{sys.executable} -m pip install -e ../ --no-deps --quiet
import numpy as np
import matplotlib.pyplot as plt
from matplotlib.lines import Line2D
import warnings
warnings.filterwarnings("ignore", "Wswiglal-redir-stdio")
import gwModels
gwModels.utils.set_rcparams()
lal.MSUN_SI != Msun
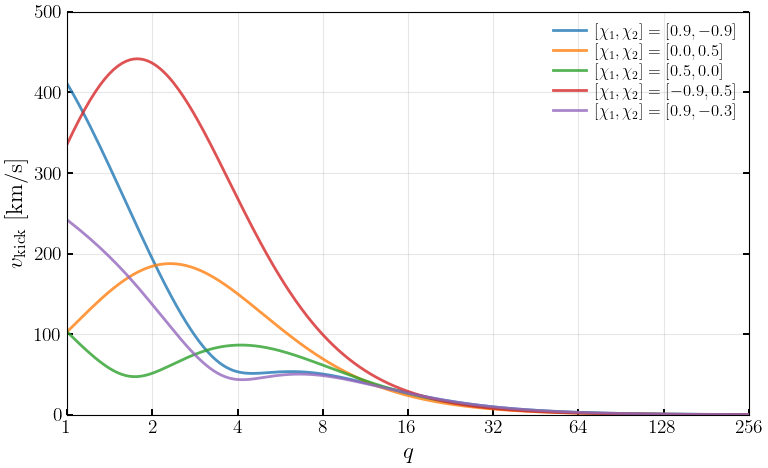
1. Aligned-spin kicks : gwModel_kick_q200
[2]:
q = 2
chi1z = 0.6
chi2z = -0.7
vk, vk_std = gwModels.remnants.gwModel_kick_q200(q, chi1z, chi2z, return_std=True)
print(f'Kick velocity: {vk:.2f} +/- {vk_std:.2f} km/s')
Kick velocity: 128.97 +/- 4.29 km/s
[3]:
q_arr = np.linspace(1, 256, 5000)
plt.figure(figsize=(8, 5))
for chi1z, chi2z, label in [
(0.9, -0.9, r'$[\chi_1,\chi_2]=[0.9,-0.9]$'),
(0.0, 0.5, r'$[\chi_1,\chi_2]=[0.0,0.5]$'),
(0.5, 0.0, r'$[\chi_1,\chi_2]=[0.5,0.0]$'),
(-0.9, 0.5, r'$[\chi_1,\chi_2]=[-0.9,0.5]$'),
(0.9, -0.3, r'$[\chi_1,\chi_2]=[0.9,-0.3]$'),
]:
vk = gwModels.remnants.gwModel_kick_q200(q_arr, chi1z, chi2z)
plt.plot(np.log2(q_arr), vk, lw=2, alpha=0.8, label=label)
plt.xlabel('$q$')
plt.ylabel(r'$v_{\rm kick}$ [km/s]')
plt.xticks([0, 1, 2, 3, 4, 5, 6, 7, 8], [1, 2, 4, 8, 16, 32, 64, 128, 256])
plt.xlim([0, 8])
plt.ylim([0, 500])
plt.legend(frameon=False)
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
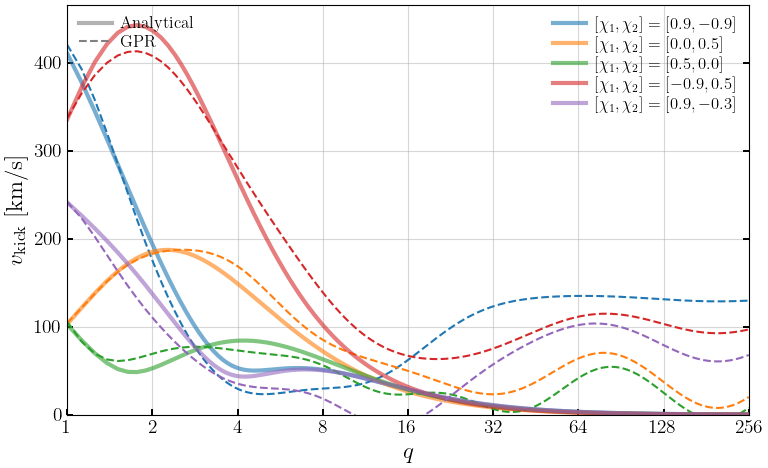
2. Aligned-spin GPR kicks : gwModel_kick_q200_GPR
[4]:
gpr_model = gwModels.remnants.gwModel_kick_q200_GPR('../gwModels/data/gwModel_kick_q200_GPR_aligned_spin.pkl')
gpr_model.info()
gwModel_kick_q200_GPR — GPR aligned-spin kick model
Islam & Wadekar (2025), https://arxiv.org/abs/2511.11536
GPR features: [log2(q), chi_hat, chi_a]
Valid range : {'q': [1, 1000], 'chi1z': [-1, 1], 'chi2z': [-1, 1]}
[5]:
# Point evaluation
vk_a = gwModels.remnants.gwModel_kick_q200(q=2, chi1z=0.6, chi2z=-0.7)
vk_g, vk_g_std = gpr_model.predict(q=2, chi1z=0.6, chi2z=-0.7)
print(f'Analytical: {vk_a:.2f} km/s')
print(f'GPR: {vk_g[0]:.2f} +/- {vk_g_std[0]:.2f} km/s')
Analytical: 128.97 km/s
GPR: 132.81 +/- 5.52 km/s
[6]:
# Comparison: analytical vs GPR across mass ratios
q_plot = np.linspace(1, 256, 2000)
spin_cases = [
(0.9, -0.9, 'C0'),
(0.0, 0.5, 'C1'),
(0.5, 0.0, 'C2'),
(-0.9, 0.5, 'C3'),
(0.9, -0.3, 'C4'),
]
plt.figure(figsize=(8, 5))
for chi1z, chi2z, color in spin_cases:
chi1z_arr = np.full_like(q_plot, chi1z)
chi2z_arr = np.full_like(q_plot, chi2z)
vk_a = gwModels.remnants.gwModel_kick_q200(q_plot, chi1z_arr, chi2z_arr)
vk_g, _ = gpr_model.predict(q_plot, chi1z_arr, chi2z_arr)
label = f'$[\\chi_1,\\chi_2]=[{chi1z},{chi2z}]$'
plt.plot(np.log2(q_plot), vk_a, c=color, lw=3, alpha=0.6, label=label)
plt.plot(np.log2(q_plot), vk_g, c=color, lw=1.5, ls='--')
legend1 = plt.legend(
handles=[
Line2D([0], [0], color='gray', lw=3, alpha=0.6, label='Analytical'),
Line2D([0], [0], color='gray', lw=1.5, ls='--', label='GPR'),
],
frameon=False, loc='upper left'
)
plt.gca().add_artist(legend1)
plt.legend(frameon=False, loc='upper right')
plt.xlabel('$q$')
plt.ylabel(r'$v_{\rm kick}$ [km/s]')
plt.xticks([0, 1, 2, 3, 4, 5, 6, 7, 8], [1, 2, 4, 8, 16, 32, 64, 128, 256])
plt.xlim([0, 8])
plt.ylim(bottom=0)
plt.tight_layout()
plt.show()
[7]:
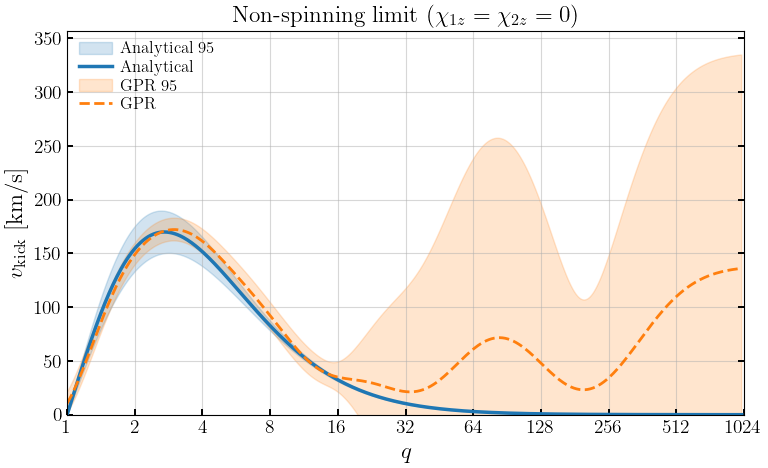
# Non-spinning limit with uncertainty bands
q_ns = np.logspace(0, 3, 500)
zeros = np.zeros_like(q_ns)
vk_a, vk_a_std = gwModels.remnants.gwModel_kick_q200(q_ns, zeros, zeros, return_std=True)
vk_g, vk_g_std = gpr_model.predict(q_ns, zeros, zeros)
plt.figure(figsize=(8, 5))
plt.fill_between(np.log2(q_ns), vk_a - 1.96*vk_a_std, vk_a + 1.96*vk_a_std,
alpha=0.2, color='C0', label='Analytical 95% CI')
plt.plot(np.log2(q_ns), vk_a, 'C0', lw=2.5, label='Analytical')
plt.fill_between(np.log2(q_ns), vk_g - 1.96*vk_g_std, vk_g + 1.96*vk_g_std,
alpha=0.2, color='C1', label='GPR 95% CI')
plt.plot(np.log2(q_ns), vk_g, 'C1--', lw=2, label='GPR')
plt.xlabel('$q$')
plt.ylabel(r'$v_{\rm kick}$ [km/s]')
plt.xticks([0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10],
[1, 2, 4, 8, 16, 32, 64, 128, 256, 512, 1024])
plt.xlim([0, 10])
plt.ylim(bottom=0)
plt.legend(frameon=False)
plt.title(r'Non-spinning limit ($\chi_{1z}=\chi_{2z}=0$)')
plt.tight_layout()
plt.show()
3. Precessing-spin kicks : gwModel_kick_prec_flow
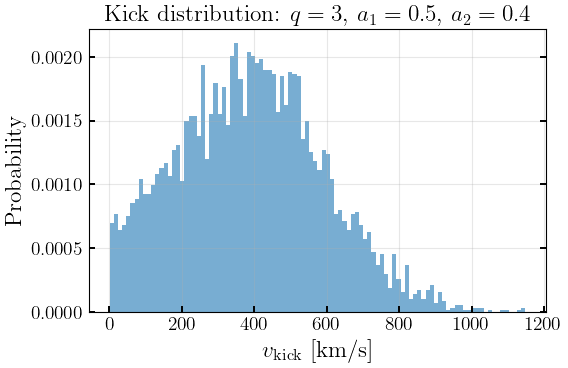
The flow model samples kick velocity distributions for given \((q, a_1, a_2)\), marginalizing over spin orientation angles.
[8]:
flow_model = gwModels.remnants.gwModel_kick_prec_flow('../gwModels/data/')
flow_model.info()
gwModel_kick_prec_flow — normalizing-flow kick model for precessing BBH
Inputs : q, a1, a2 (spin angles marginalized)
Flow config : d_in=1, d_hidden=8, d_context=3, n_layers=2
[9]:
samples = flow_model.sample(q=3, a1=0.5, a2=0.4, num_samples=5000)
plt.figure(figsize=(6, 4))
plt.hist(samples, bins=100, density=True, alpha=0.6)
plt.xlabel(r'$v_{\rm kick}$ [km/s]')
plt.ylabel('Probability')
plt.title(r'Kick distribution: $q=3$, $a_1=0.5$, $a_2=0.4$')
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
[10]:
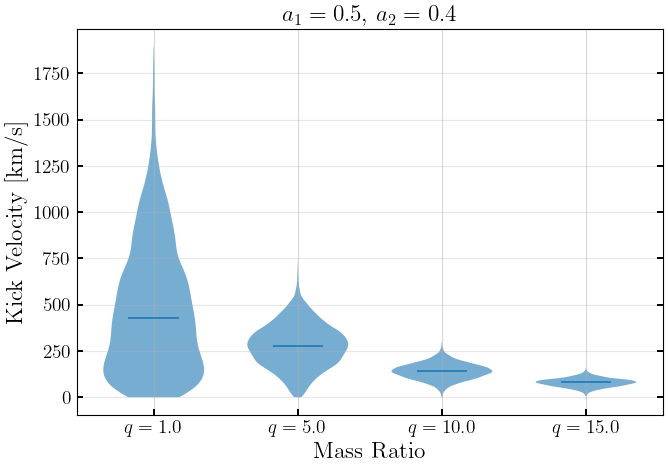
mass_ratios = [1.0, 5.0, 10.0, 15.0]
a1_test, a2_test = 0.5, 0.4
all_samples = []
for q_test in mass_ratios:
s = flow_model.sample(q=q_test, a1=a1_test, a2=a2_test, num_samples=5000)
all_samples.append(s)
plt.figure(figsize=(7, 5))
parts = plt.violinplot(all_samples, positions=range(len(mass_ratios)),
widths=0.7, showmedians=True, showextrema=False)
for pc in parts['bodies']:
pc.set_alpha(0.6)
plt.xticks(range(len(mass_ratios)), [f'$q={q}$' for q in mass_ratios])
plt.xlabel('Mass Ratio')
plt.ylabel('Kick Velocity [km/s]')
plt.title(f'$a_1={a1_test}$, $a_2={a2_test}$')
plt.grid(axis='y', alpha=0.3)
plt.tight_layout()
plt.show()
3. Batched sampling and density evaluation
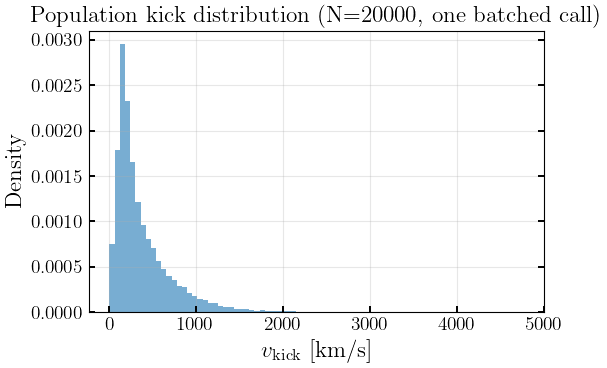
sample and log_prob accept array (q, a1, a2) and evaluate the whole population in a single call to the flow — orders of magnitude faster than looping one binary at a time.
sample(q, a1, a2, num_samples=1)→ one kick per binary, shape(N,)(usenum_samples=Mfor(N, M)).log_prob(v, q, a1, a2)→ conditional density of the kick magnitude; it integrates to 1 and is the primitive for inverting the model (inferring the progenitor from an observed kick).
[11]:
import time
rng = np.random.default_rng(0)
N = 20000
q_pop = rng.uniform(1, 8, N)
a1_pop = rng.uniform(0.05, 1, N)
a2_pop = rng.uniform(0.05, 1, N)
# One batched call: a kick for every binary
t = time.time()
vk = flow_model.sample(q_pop, a1_pop, a2_pop, num_samples=1)
t_batched = time.time() - t
# The slow way (loop over a subset), extrapolated to full N for comparison
t = time.time()
_ = [flow_model.sample(q_pop[i], a1_pop[i], a2_pop[i], num_samples=1)[0]
for i in range(2000)]
t_loop = (time.time() - t) * (N / 2000)
print(f'batched : {t_batched:.3f} s for {N} binaries -> shape {vk.shape}')
print(f'per-binary : ~{t_loop:.1f} s (extrapolated) -> ~{t_loop / t_batched:.0f}x slower')
plt.figure(figsize=(6, 4))
plt.hist(vk, bins=80, density=True, alpha=0.6)
plt.xlabel(r'$v_{\rm kick}$ [km/s]')
plt.ylabel('Density')
plt.title(f'Population kick distribution (N={N}, one batched call)')
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
batched : 0.005 s for 20000 binaries -> shape (20000,)
per-binary : ~4.2 s (extrapolated) -> ~905x slower
Validation: batched sampling vs one-by-one sampling
Batched and per-binary calls consume the RNG in a different order, so they are not element-wise identical — but they must be statistically equivalent. We verify this with a two-sample KS test for a few representative binaries.
[ ]:
from scipy.stats import ks_2samp
test_cases = [
(2.0, 0.6, 0.3),
(5.0, 0.8, 0.2),
(10.0, 0.4, 0.9),
]
n_samples = 5000
print('Batched vs one-by-one KS test (p > 0.01 means consistent):')
for q_t, a1_t, a2_t in test_cases:
# Batched: draw n_samples for a single binary via scalar call
samples_batched = flow_model.sample(q_t, a1_t, a2_t, num_samples=n_samples)
# One-by-one: repeat the same scalar binary n_samples times as an array,
# drawing one sample each — exercises the batched code path differently
q_arr = np.full(n_samples, q_t)
a1_arr = np.full(n_samples, a1_t)
a2_arr = np.full(n_samples, a2_t)
samples_loop = flow_model.sample(q_arr, a1_arr, a2_arr, num_samples=1)
stat, pval = ks_2samp(samples_batched, samples_loop)
status = 'PASS' if pval > 0.01 else 'FAIL'
print(f' q={q_t}, a1={a1_t}, a2={a2_t}: KS={stat:.4f}, p={pval:.3f} [{status}]')
assert pval > 0.01, (
f'KS test failed for q={q_t}, a1={a1_t}, a2={a2_t}: p={pval:.4f}'
)
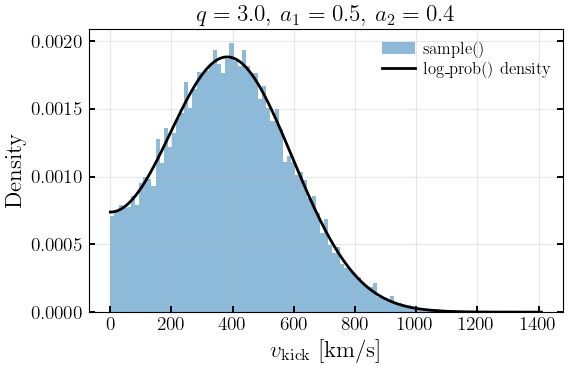
Conditional density: log_prob
log_prob returns \(\log p(v_{\rm kick}\,|\,q, a_1, a_2)\) for the kick magnitude. Overlaying it on a histogram of sample draws confirms the two are consistent, and the density integrates to 1.
[12]:
q0, a10, a20 = 3.0, 0.5, 0.4
samples = flow_model.sample(q0, a10, a20, num_samples=20000)
v_grid = np.linspace(0, samples.max() * 1.05, 1000)
pdf = np.exp(flow_model.log_prob(v_grid, q0, a10, a20))
trapz = np.trapezoid if hasattr(np, 'trapezoid') else np.trapz
print(f'integral of p(v) dv = {trapz(pdf, v_grid):.3f}')
plt.figure(figsize=(6, 4))
plt.hist(samples, bins=100, density=True, alpha=0.5, label='sample()')
plt.plot(v_grid, pdf, 'k-', lw=2, label='log_prob() density')
plt.xlabel(r'$v_{\rm kick}$ [km/s]')
plt.ylabel('Density')
plt.title(rf'$q={q0}$, $a_1={a10}$, $a_2={a20}$')
plt.legend(frameon=False)
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
integral of p(v) dv = 1.000
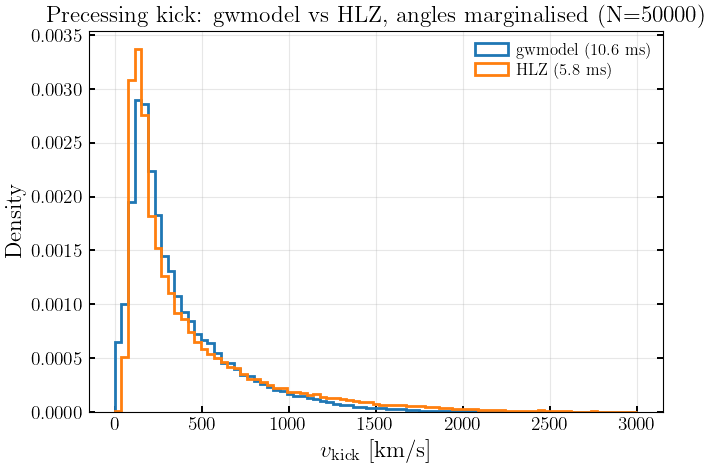
gwmodel vs HLZ on the same population
Both models are evaluated on the same array of (q, a1, a2). The flow (gwmodel) marginalises over spin orientation internally; the HLZ / CLZM2007 formula needs explicit angles, so we draw isotropic spin orientations and a random recoil phase Theta for it — making both a kick distribution over the same population, angles marginalised. We overlay the distributions and time each (both fully vectorised).
[13]:
import time
rng = np.random.default_rng(1)
N = 50000
q = rng.uniform(1, 8, N)
a1 = rng.uniform(0.05, 1.0, N)
a2 = rng.uniform(0.05, 1.0, N)
# gwmodel (flow): one batched call, spin angles marginalised internally
t = time.time()
vk_flow = flow_model.sample(q, a1, a2, num_samples=1)
t_flow = time.time() - t
# HLZ (CLZM2007): supply isotropic spin angles + random recoil phase Theta
theta1 = np.arccos(rng.uniform(-1, 1, N))
theta2 = np.arccos(rng.uniform(-1, 1, N))
delta_phi = rng.uniform(0, 2 * np.pi, N)
Theta = rng.uniform(0, 2 * np.pi, N)
t = time.time()
vk_hlz = gwModels.remnants.bbh_final_kick_precessing_CLZM2007(
q, a1, a2, theta1, theta2, delta_phi, Theta=Theta)
t_hlz = time.time() - t
print(f'N = {N} binaries')
print(f' gwmodel (flow): {t_flow * 1e3:7.2f} ms '
f'median {np.median(vk_flow):6.1f} km/s')
print(f' HLZ (CLZM2007): {t_hlz * 1e3:7.2f} ms '
f'median {np.median(vk_hlz):6.1f} km/s')
bins = np.linspace(0, 3000, 80)
plt.figure(figsize=(7, 5))
plt.hist(vk_flow, bins=bins, density=True, histtype='step', lw=2,
label=f'gwmodel ({t_flow * 1e3:.1f} ms)')
plt.hist(vk_hlz, bins=bins, density=True, histtype='step', lw=2,
label=f'HLZ ({t_hlz * 1e3:.1f} ms)')
plt.xlabel(r'$v_{\rm kick}$ [km/s]')
plt.ylabel('Density')
plt.title(f'Precessing kick: gwmodel vs HLZ, angles marginalised (N={N})')
plt.legend(frameon=False)
plt.grid(alpha=0.3)
plt.tight_layout()
plt.show()
N = 50000 binaries
gwmodel (flow): 10.61 ms median 259.9 km/s
HLZ (CLZM2007): 5.84 ms median 268.7 km/s